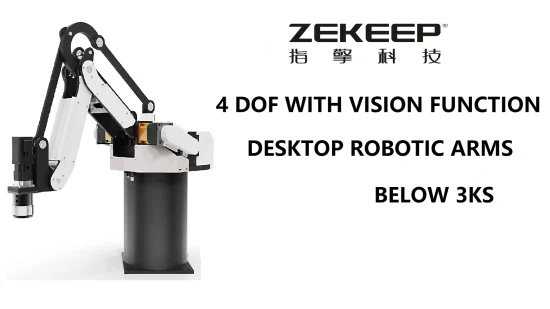
미니 로봇 팔, 서보 모터와 드라이버를 갖춘 CNC 로봇 제어 시스템을 갖춘 4축 3kg 팔레타이징 로봇 팔
산업용 데스크탑 로봇 ARM 하이브리드 서보 모터 4축 2차 개발 지원 ITEM NO. ZKBOT-4086 산업용 로봇 팔입니다. 현재 당사의 주요 생산지역은
설명
기본정보
| 모델 번호. | ZKBOT-4086 |
| Dof | 4개의 축 |
| 운송 패키지 | 선적 |
| 사양 | 180*180mm 0,2CBM |
| 등록 상표 | 비누 |
| 기원 | 중국 |
| HS 코드 | 8501109190 |
| 생산 능력 | 1000개/년 |
상품 설명
산업용 데스크탑 로봇 팔하이브리드 서보모터 4 AXES 2차 개발 지원 ITEM NO. ZKBOT-4086
산업용 로봇 팔
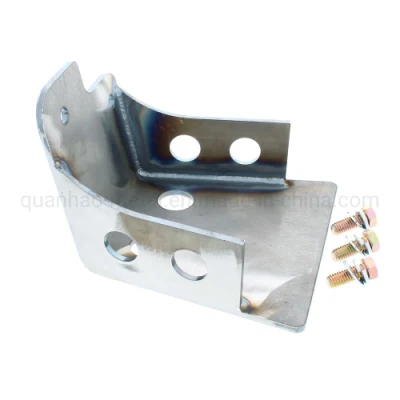
현재 당사의 주요 생산단위에는 5kg 미만의 3축 및 4축 로봇팔이 탑재되어 있습니다. 주로 금속 가공, 산업용 소형 부품 취급, 스프레이, 의료 산업, 식품 및 음료 산업 및 가전 제품에 사용됩니다.
회사 소개
ZEKEEP(Foshan Zekeep Technology)은 중국 내 산업용 로봇 팔의 개발 및 업그레이드를 촉진하고 이 분야의 대규모 애플리케이션을 지속적으로 개발하기 위해 2015년 중국 포산에 설립되었습니다. 2015년부터 소규모 산업체를 위한 경제적이고 지능적인 로봇팔과 교육용 로봇팔 연구개발에 주력해 왔습니다.

| 로봇 작업 매개변수 | |
| 모델: ZKBOT-4086 | DOF: 4개의 축 |
| 탑재량: 3kg | 반복 위치 정확도: ±0.1mm |
| 최대 도달 거리: 710mm | 작동 온도: -10°~50° |
| 공급 전압: AC220V/110V | 전력: 최대 150W |
| 이동 위치: 점대점/점대선/선대선 | 좌표계: 공통 좌표계/세계 좌표계 |
| I/O: 입력 10 / 출력 8 | 전력 소비: 50W |
| 모터: 42 하이브리드 서보 모터 | 제어: 모바일 앱/원격 제어/제어 상자 |
| 적용 환경: 가연성, 폭발성 또는 부식성 가스 및 액체와의 접촉을 피하십시오. 전자 간섭원(플라즈마)으로부터 멀리 두십시오. | |
| AXIS 작업 매개변수 | |||
| J1 | 140°/초 | ||
| 최대 속도: | J2 | 120°/초 | |
| J3 | 100°/초 | ||
| J4 | 160°/초 | ||
| J1 | -162°-162° | ||
| 최대 작동 범위: | J2 | -115°-0° | |
| J3 | -115°-° | ||
| J4 | -162°-162° | ||
| 로봇 기본 매개변수 | |
| 재질: 알루미늄 합금 | 기본 크기: 180mm*180mm |
| 순중량(kg): 5.2kg | 총중량(kg): 9kg |
| 제어 상자 크기: (L) 260mm * (W) 160mm * (H) 260mm | |
| 포장 크기: (L) 490mm * (B) 320mm * (H) 380mm | |
| 스테퍼 모터 매개변수 | |
| 유지 토크: 0.4 N*M | 정격 전압: 24V |
| 정격 전류: 1.7A | 스텝 각도: 1.8° |




당사 연락처
지금 보내